
www.tillverkning-sverige.com
16
'20
Written on Modified on
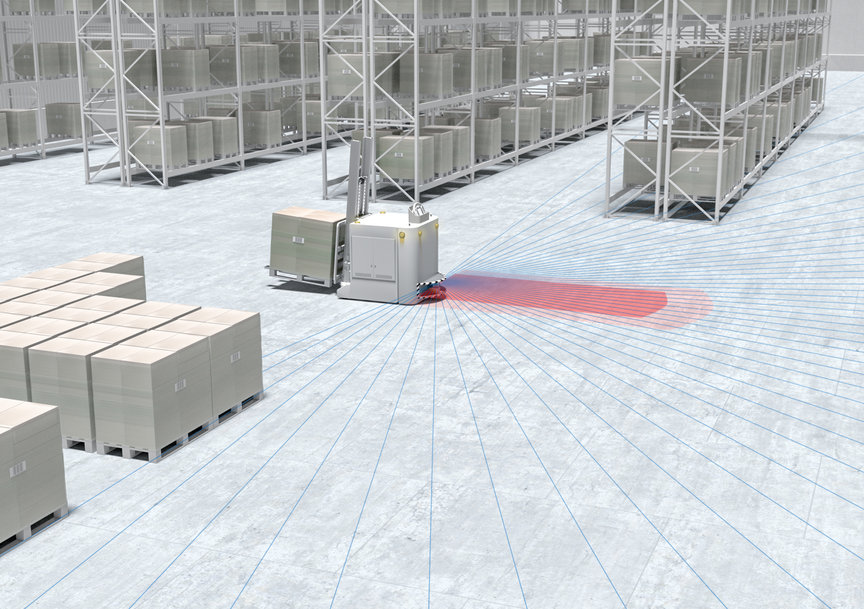
Förarlösa transportsystem (AGV) vilka är möjligheterna?
Det finns många olika teknologier på marknaden för att transportera en AGV (automated guided vehicle) till sin destination. Många vägar leder till Rom och det finns inget rätt eller fel sätt. Avgörande är var och hur AGV:n skall tillämpas.
Det finns olika processer och tekniker för att navigera en AGV från punkt A till punkt B. De olika möjligheterna sträcker sig från konturnavigering (naturlig navigering) till laserradar, optisk eller induktiv vägledning till matrisnavigering (grid navigation). Vilken teknik som används beror framför allt på den specifika tillämpningen. Priset på själva AGV:n kan också användas som en grov riktlinje. Kostnaderna för navigeringstekniken bör inte överstiga 5% av AGV-priset. För en AGV på 10 000 EUR kommer konturnavigering och laserradar inte ifråga eftersom deras kostnader ligger över 500 euro. Ett annat avgörande kriterium för den ena eller den andra varianten är om AGV:n är ett fordon som ska köra under en last ett s.k. plattformsfordon. Deras design gör dem olämpliga för till exempel laserradar, vilket utesluter denna lösning för dessa AGV:er. Mot denna bakgrund beaktas de olika navigationsmöjligheterna i detalj här nedan med avseende på deras möjliga användningsområden.
Konturnavigering (naturlig navigering)
Konturnavigering kallas också “naturlig navigering”. Dessa är de mest tekniskt komplexa och de dyraste typerna av navigationssystem. De är oöverträffliga när det gäller flexibilitet och noggrannhet. Skulle det vara nödvändigt att ändra transportvägen på kort varsel kan detta utföras mycket enkelt och snabbt med ett musklick i högnivåmjukvaran, i den så kallade fleet-hanteringen. Eftersom sensorn på AGV:n vanligtvis är monterad nära golvet är denna navigationsvariant lämplig för automatiska höglagertruckar och traktorer såväl som plattformsfordon som beskrivs ovan. För denna typ av navigering krävs inga ytterligare verktyg - såsom reflektorer eller optiska eller magnetiska spår - eller märkning eller koder.
Laserradar
Navigation med hjälp av laserradar är likvärdig konturnavigering i flexibilitet. Denna navigationsvariant kräver dock alltid en extra optisk anslutning av sensorn till reflektorerna. Varje sensor måste därför monteras tillräckligt högt på AGV:n så att den alltid har en tydlig bild av reflektorerna. Om anslutningen till reflektorerna avbryts, t.ex. när man kommer in i en hyllkorridor, måste AGV:n växla till en annan typ av navigering. Detta gör det svårare att byta till ett annat rum om det behövs, vilket begränsar flexibiliteten.
Optisk och induktiv vägledning
Optisk och induktiv vägledning är vanligtvis mycket enkla system som följer ett fördefinierat spår. Som ett resultat av detta är de mycket begränsade vad gäller flexibilitet. Å andra sidan representerar de dock en mycket kostnadsoptimerad lösning. Eftersom sensorn på AGV:n är monterad på endast ett kort avstånd från golvet, är en sådan navigationsform oberoende av den valda fordonstypen.

Optisk vägledning med OGS 600
Nätnavigering
Med den så kallade matrisnavigeringen är information inbäddad i ett specificerat rutnät på eller i ytan som ska köras på, t.ex. 2D-koder eller transpondrar. Med hjälp av den information som fastställs under resan över de enskilda matrispunkterna - med en 2D-kod är det t.ex. kodinformation och läsvinkel - kan AGV:n navigera mellan de individuella matrispunkterna och därmed nå en specifik punkt inom rutnätet. Denna typ av navigering är framför allt lämplig för rena ytor och ytor som inte utsätts för tung belastning.
En allmän utvärdering och rekommendation för lämplig navigationsvariant kan endast fastställas i kombination med AGV:ns funktion inom den speciella tillämpningen. För närvarande finns det dock en tydlig trend mot konturnavigering med integrerad säkerhetsfunktion.
Matthias Göhner
Industry Management Intralogistics
Leuze electronic GmbH + Co. KG
