
HMS Industrial Networks: Att kommunicera med robotar i rörelse
Kommunikations- och säkerhetsutmaningar för tillverkare av mobila robotar (AGVer). Mobila robotar finns överallt, på lager, sjukhus, ja till och med i trafiken. Det är lätt att förstå varför de blivit så populära ‒ de är billigare, pålitligare, lättare att få tag på och mer produktiva än mänskliga arbetare.

AMR:er är mer dynamiska. De navigerar via kartor och använder data från kameror, inbyggda sensorer eller laserskannrar för att känna av sin omgivning och välja den mest effektiva rutten. Om ett föremål blockerar en AMR:s planerade rutt väljer AMR:en bara en annan rutt. Eftersom AMR:er inte är beroende av styrande infrastruktur går det snabbare att installera dem. Dessutom kan de anpassa sig till logistiska förändringar.
Vilka är utmaningarna med kommunikation och säkerhet som tillverkare av mobila robotar ställs inför?
1. Upprätta en trådlös anslutning
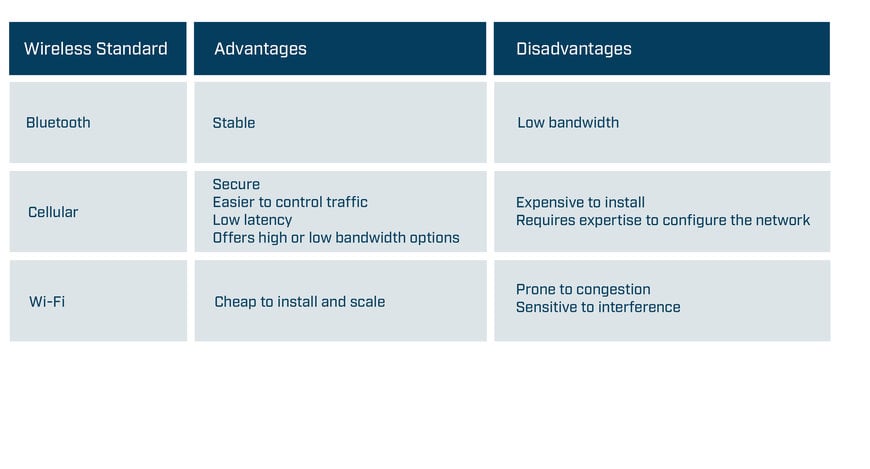
Standard för trådlöst nätverk ‒ fördelar och nackdelar
Platsundersökningen ska fastställa optimal placering av åtkomstpunkterna, rätt antenntyp, optimal antennvinkel och hur man kan begränsa störningar. Efter utförd installation ska en s.k. sniffer tools användas för kontroll av nätverksdesignen och justering av åtkomstpunkter eller antenn efter behov.
2. Koppla upp mobila robotar till industriella nätverk
Mobila robotar måste kunna kommunicera med styrenheter, även om de mobila robotarna och styrenheterna inte använder samma industriella nätverksprotokoll.
En AGV kanske till exempel använder CANopen medan styrenheten använder PROFINET. Dessutom vill man kanske använda samma AGV-modell på en annan plats där styrenheten använder ytterligare ett industriellt nätverksprotokoll, till exempel EtherCAT.
Tillverkare av mobila robotar måste också säkerställa att deras mobila robotar har tillräcklig kapacitet för att bearbeta den mängd data som krävs. Den erforderliga mängden data varierar beroende på omfattningen av installationen och typ av installation. Vid omfattande installationer används vanligtvis mer data eftersom routningsalgoritmerna behöver täcka ett större område, fler fordon och fler potentiella rutter. Navigationssystem som bygger på visuell navigering bearbetar bilder, och därför krävs mer processorkraft än vid installationer där någon annan typ av navigationssystem används, till exempel reflektorer. Följaktligen måste tillverkare av mobila robotar lösa följande utmaningar:
- De behöver en nätverksteknik som stöder alla större fältbussnätverk och industriella Ethernet-nätverk.
- Det måste vara enkelt att göra ändringar i nätverkstekniken så att den mobila roboten kan kommunicera i samma industriella nätverk som styrenheten utan att behöva göra ändringar i maskinvarudesignen.
- De måste se till att nätverkstekniken har tillräcklig kapacitet och funktionalitet för att bearbeta de data som krävs.
3. Skapa ett säkert system
De måste se till att de mobila robotarna reagerar på till exempel att någon öppnar en säkerhetsdörr eller trycker på en nödstoppsknapp, och att nätverkslösningen kan bearbeta olika säkerhetsprotokoll.
De måste ta hänsyn till det faktum att AMR:er rör sig fritt omkring i arbetsmiljön och hantera risken för kollisioner. Tekniken som används i sensorer utvecklas ständigt, och tillverkare av mobila robotar måste följa utvecklingen för att säkerställa att deras produkter förblir så effektiva som möjligt.
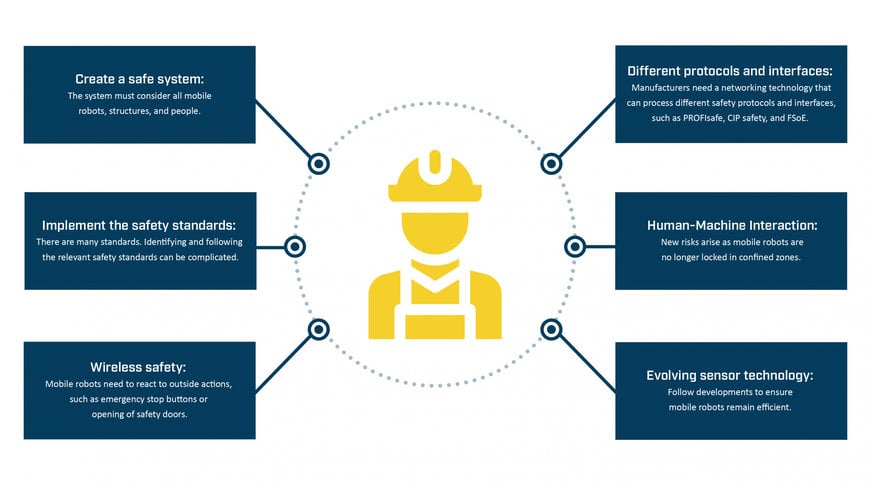
Översikt över utmaningar på säkerhetsområdet för tillverkare av mobila robotar
Säkerhetsstandarder
Även om det huvudsakligen är frivilligt att följa de olika säkerhetsstandarderna (ISO, DIN, IEC, ANSI osv.) är maskintillverkare i Europeiska unionen enligt lag skyldiga att följa säkerhetsstandarderna i maskindirektiven. Maskindirektivet 2006/42/EG är alltid tillämpligt för tillverkare av mobila robotar, och för vissa tillämpningar kan direktiv 2014/30/EU också vara relevant eftersom bestämmelserna i detta direktiv gäller maskiners elektromagnetiska kompatibilitet. I maskindirektivet 2006/42/EG beskrivs kraven för utformning och konstruktion av säkra maskiner som introduceras på den europeiska marknaden. Tillverkare har endast rätt att förse maskinen med CE-märkning och leverera den till sina kunder om de i försäkran om överensstämmelse kan bevisa att de har uppfyllt direktivets krav.
Även om de andra säkerhetsstandarderna inte är obligatoriska bör tillverkarna fortfarande följa riktlinjerna i dem eftersom de hjälper till att uppfylla kraven i maskindirektivet 2006/42/EG. Tillverkare kan till exempel följa riktlinjerna i SS-EN ISO 12100 för att reducera identifierade risker till en godtagbar kvarstående risk. De kan använda sig av SS-EN ISO 13849 eller SS-EN IEC 62061 för att specificera den säkerhetsnivå som krävs för varje risk och säkerställa att motsvarande säkerhetsrelaterade funktion uppfyller de definierade kraven. Det är tillverkarna av mobila robotar som själva bestämmer på vilket sätt de ska uppnå en viss säkerhetsnivå. Till exempel kan de sänka hastigheten för att minska risken för kollisioner och begränsa hur pass allvarliga personskador blir. Eller så kan de se till att robotarna endast arbetar i separerade zoner där tillträde är förbjudet (definieras som avgränsade zoner i ISO 3691-4).
Att identifiera rätt standarder och implementera kraven är det bästa sättet för tillverkare av mobila robotar att skapa ett säkert system. Det rör sig dock om en komplicerad och tidskrävande process, något som också antyds i denna sammanfattning.
4. Säkerställa en tillförlitlig CAN-kommunikation
För tillverkare av mobila robotar har det blivit ännu viktigare än tidigare att upprätta en CAN-anslutning eftersom det gör det möjligt för dem att övervaka batterinivån i de litiumjonbatterier som i allt högre utsträckning används i drivsystem för mobila robotar, antingen i eftermonteringssystem eller i nya installationer. Det här är vad tillverkare av mobila robotar behöver göra:
2. Skydda system mot elektromagnetiska störningar eftersom elektromagnetiska störningar kan förstöra ett systems elektronik. Risken för elektromagnetiska störningar är betydande vid eftermontering eftersom när man lägger till nya komponenter, till exempel batterier bredvid kommunikationskabeln, ger detta upphov till elektromagnetiska störningar med hög frekvens.
Möjligheten att få fjärråtkomst till en maskins styrsystem kan göra det möjligt för leverantörer av mobila robotar eller ingenjörer att felsöka och lösa de flesta problem utan att behöva resa till installationsplatsen.
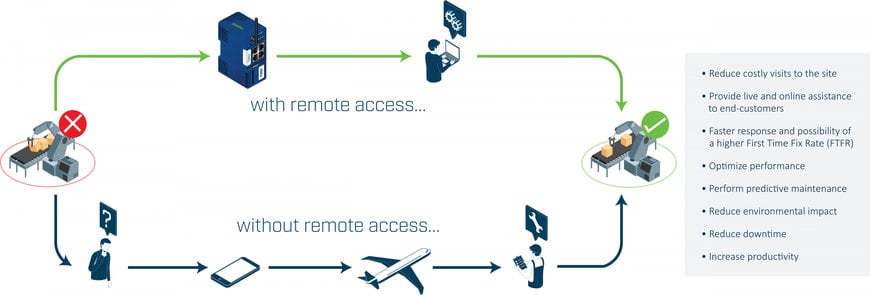
Fördelar med fjärråtkomst
Utmaningen består i att skapa en lösning för fjärråtkomst som balanserar IT-avdelningens behov med ingenjörens eller leverantörens behov.
IT-avdelningen vill säkerställa att nätverket förblir säkert och tillförlitligt och bibehåller sin integritet. Följaktligen bör fjärråtkomstlösningen inkludera följande säkerhetsåtgärder:
- Använder utgående istället för inkommande anslutningar för att minimera inverkan på brandväggen.
- Separerar relevant trafik från resten av nätverket.
- Krypterar och skyddar all nätverkstrafik för att säkerställa konfidentialitet och integritet.
- Säkerställer att leverantörer arbetar i enlighet med eller är certifierade enligt relevanta säkerhetsstandarder, till exempel ISO 27001.
- Säkerställer att leverantörerna genomför regelbundna säkerhetsrevisioner.
Som vi kan se måste tillverkare av mobila robotar lösa många utmaningar med kommunikation och säkerhet. De måste upprätta en trådlös anslutning, skicka data över olika nätverk, säkerställa säkerheten, ansluta till CAN-system och få säker fjärråtkomst till robotarna. Och för att göra det än mer komplicerat måste varje installation genomgå förnyad bedömning och anpassas för att kraven på plats ska uppfyllas.
Bästa praxis för att implementera kommunikation för mobila robotar
Det är sällan som tillverkare av mobila robotar är experter på kommunikation eller säkerhet. Därför kan de tycka att det är tidskrävande och dyrt att försöka utveckla den kommunikationsteknik som krävs internt inom företaget. Att då ta specialbyggda kommunikationslösningar från tredje part i anspråk löser inte bara utmaningarna med kommunikation men ger också andra fördelar.
Moderna kommunikationslösningar har en modulär design som gör det möjligt för tillverkare av mobila robotar att demontera en nätverksprodukt för en viss standard eller ett visst protokoll och ersätta den med en nätverksprodukt för en annan standard eller ett annat protokoll utan att detta påverkar någon annan del av maskinen. Bluetooth kan till exempel vara den mest lämpliga trådlösa standarden i en installation medan Wi-Fi kan ge bättre täckning i en annan installation. Likaledes kanske man på en installationsplats använder sig av protokollen PROFINET och PROFIsafe medan man på en annan installationsplats använder andra industriella nätverksprotokoll och säkerhetsprotokoll. I båda fallen kan tillverkare av mobila robotar använda kommunikationsprodukter för att göra ändringar i nätverkstekniken så att de lokala kraven uppfylls utan att några ändringar i maskinvarudesignen behöver göras.
Författare:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
HMS Networks
HMS Networks är experter på industriell kommunikation och tillhandahåller flera lösningar för AGV-kommunikation.
Läs mer på www.hms-networks.com/agv
